")

")
")
")
")

")
")
")

描述
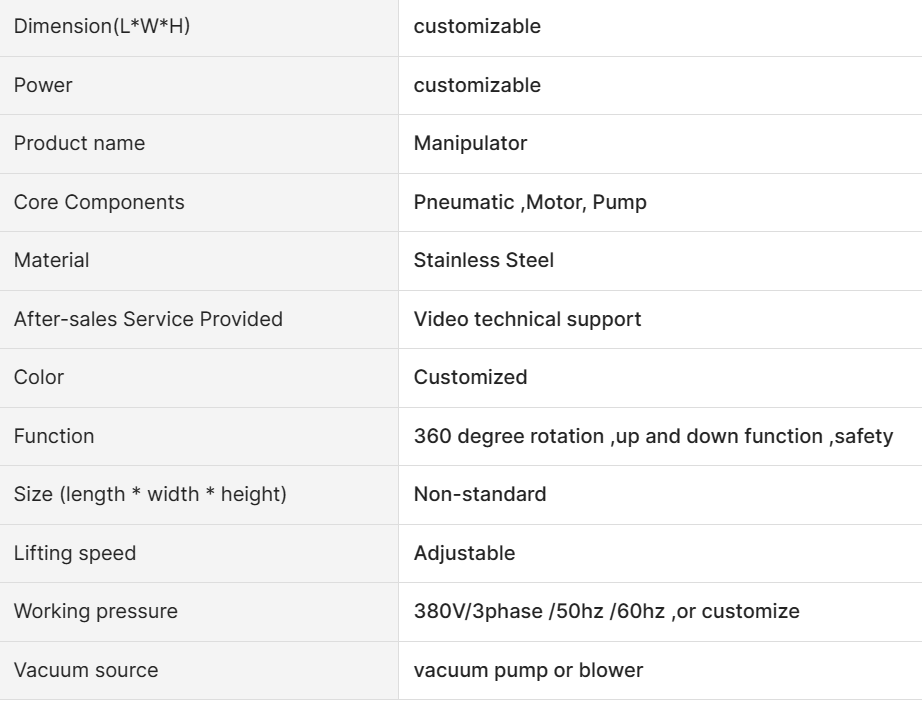
OEM-Pneumatic Pick and Place Robot Arm Manipulator
The industry manipulator is a set of assisted handling equipment designed based on dynamics and ergonomics, and its operation mode is through manual button operation, by the gripping of the fixture tooling to achieve the transfer action of the object.
The general application scenarios mainly include:
1. The target object is too heavy or too large to achieve manual handling
2. The transfer angle and position of the target object are difficult to achieve manually
3. The target object is easy to cause high loss through manual transfer
4. The target object is easy to cause large manpower loss
Based on the above situation, we introduced the robot as an auxiliary handling tool to solve the problem perfectly. In this process, irregular objects, heavy objects, and special objects have achieved efficient transfer, saving and protecting manpower loss, and it’s been more and more widely used in the industrial production process.

")
")
")